
在现代电机控制领域,磁场定向控制(Field-Oriented Control, FOC)凭借其高效、精准的特性,成为驱动交流电机的核心技术。无论是工业机器人还是家用电器,FOC通过模拟直流电机的控制方式,将定子电流分解为转矩和励磁分量,显著提升了动态响应与能效。根据是否依赖物理传感器,FOC分为有感FOC与无感FOC,两者各有优劣,适用于不同场景。本文将深入解析其原理、特点及应用。
FOC的核心思想是通过坐标变换(Clarke/Park变换),将三相交流电机的定子电流转换为旋转坐标系下的直轴(Id,励磁分量)和交轴(Iq,转矩分量)。在这个坐标系中,Id和Iq分别对其进行独立控制,就如同控制直流电机一样,从而实现对电机的转速、位置和转矩的精确控制。
有感 FOC 算法通常需要使用磁传感器(如霍尔传感器)、光学编码器或磁编码器等器件来精确感知电机转子的位置和速度。其工作原理是基于磁场定向控制理论,通过传感器获取转子的实时位置信息,将电机的三相电流和电压变换到以转子磁场为定向的旋转坐标系(dq 轴)下进行控制。该算法的优点是控制精度高、稳定性好,能够在各种工况下实现电机的精准定位和转速控制,适用于对控制精度和动态性能要求较高的场合,如工业机器人、数控机床、航空航天等领域。但缺点是需要额外安装传感器,增加了系统的成本、复杂度和体积,同时传感器的安装和维护也需要一定的技术和成本。
不过,有感FOC里面的传感器及接口电路增加硬件成本,且占用安装空间。同时,传感器在震动、油污等恶劣环境下易失效。
无感 FOC 算法则不需要使用专门的位置传感器来检测转子位置,而是通过检测电机的相电流、反电动势或其他电气量,利用复杂的算法来估算电机转子的位置和速度。常见的方法有基于反电动势法、定子磁链法、电感法等,也有采用位置观测器和反正切或锁相环(PLL)计算的组合来构成位置观测算法。
无感 FOC 算法同样是将电机的电流和电压进行坐标变换,在 dq 轴坐标系下进行控制,但转子位置和速度的获取是通过对采样数据的计算和分析得到的。这种算法的优势在于降低了系统成本,提高了可靠性和抗干扰性,减少了电机体积和复杂度,适用于对成本敏感、安装空间有限且对控制精度要求不是极高的场合,如家用电器、电动工具、工业风机等。不过,无感 FOC 算法的缺点是在低速时,由于反电动势较小,信号检测和处理难度大,导致估算精度下降,控制性能不如有感 FOC 算法,且算法复杂度较高,对控制器的计算能力有一定要求。
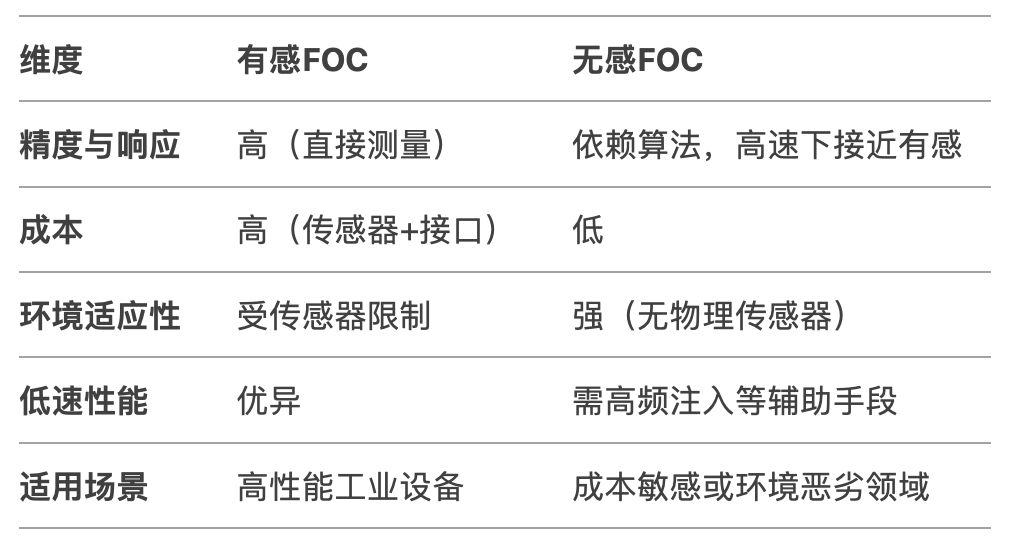
综上所述,有感FOC和无感FOC之间的对比如下图所示。
面向未来,随着芯片算力的提升与智能算法的演进,无感FOC正逐步渗透至高端领域。例如,新能源汽车的冗余驱动系统中,无感方案可作为备份控制;而融合AI参数自整定技术,进一步提升了无感FOC的适应性。然而,在绝对精度与可靠性要求极高的场景(如航天、伺服),有感FOC仍是首选。
免责声明: 本文章转自其它平台,并不代表本站观点及立场。若有侵权或异议,请联系我们删除。谢谢! Disclaimer: This article is reproduced from other platforms and does not represent the views or positions of this website. If there is any infringement or objection, please contact us to delete it. thank you! |
- 上一篇:步进电机力矩为何会随速度升高而变低?
- 下一篇:详解IIC通信协议原理

关注矽源特公众号

矽源特微信客服
 发送邮件
发送邮件 商务QQ客服
商务QQ客服 13823761625
13823761625
